Movimento circolare g2/g3, 13 mo vimenti linear i e cir c olar i semplici – HEIDENHAIN CNC Pilot 4290 V7.1 Manuale d'uso
Pagina 190
190
4.13 Mo
vimenti linear
i e cir
c
olar
i semplici
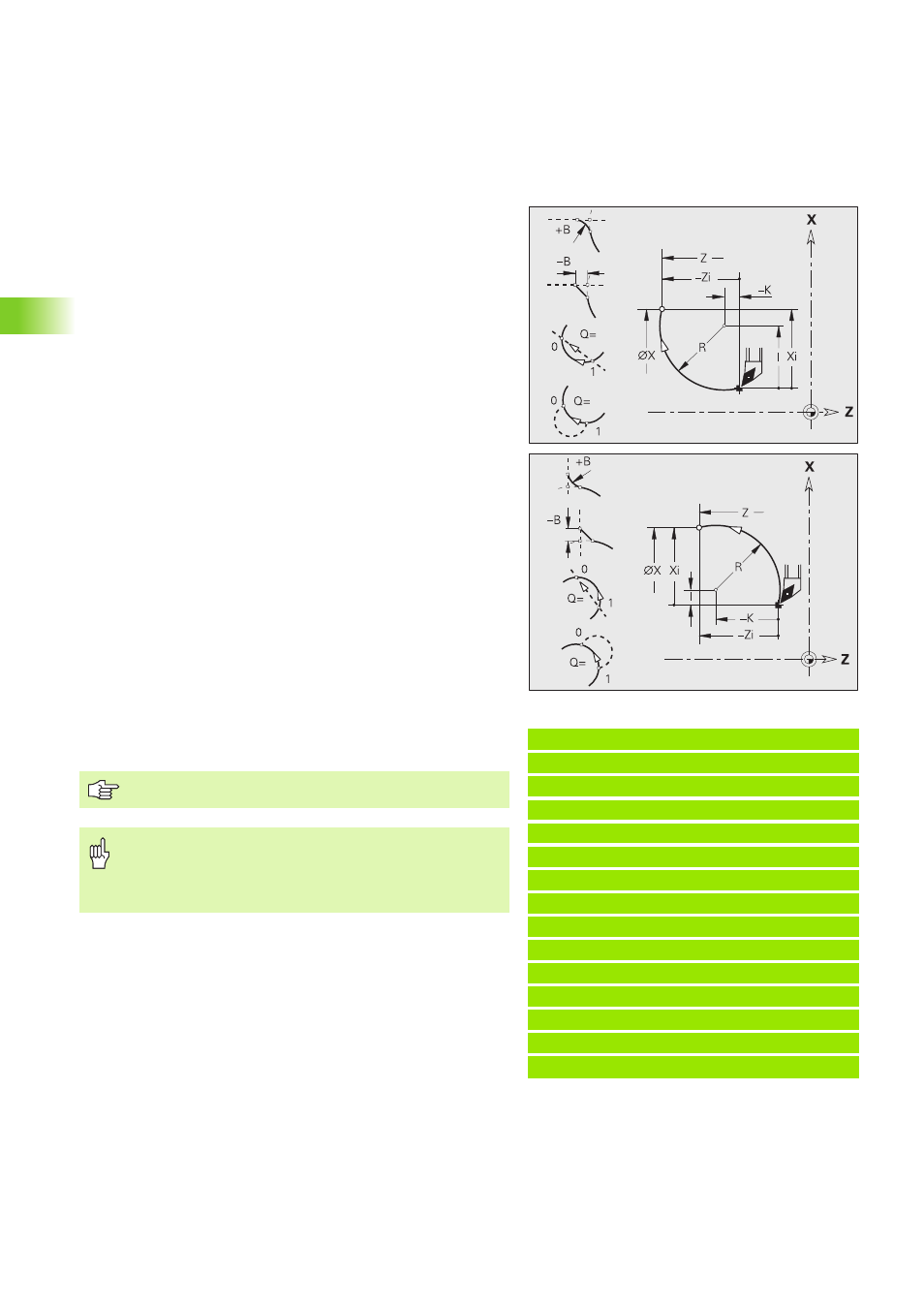
Movimento circolare G2/G3
L'istruzione G2/G3 trasla con avanzamento circolare al "Punto finale".
La quotatura del centro avviene in modo incrementale. Senso di
rotazione (vedere la grafica di supporto):
G2: in senso orario
G3: in senso antiorario
Esempio: G2, G3
. . .
N1 T3 G95 F0.25 G96 S200 M3
N2 G0 X0 Z2
N3 G42
N4 G1 Z0
N5 G1 X15 B-0.5 E0.05
N6 G1 Z-25 B0
N7 G2 X45 Z-32 R36 B2
N8 G1 A0
N9 G2 X80 Z-80 R20 B5
N10 G1 Z-95 B0
N11 G3 X80 Z-135 R40 B0
N12 G1 Z-140
N13 G1 X82 G40
. . .
Parametri
X
Punto finale (quota diametrale)
Z
Punto finale
R
Raggio (0 < R <= 200 000 mm)
I
Centro incrementale (distanza punto di partenza – centro; quota
radiale)
K
Centro incrementale (distanza punto di partenza – centro)
Q
Punto d'intersezione. Punto finale se l'arco di cerchio interseca
una retta o un arco di cerchio (default: 0):
Q=0: punto d'intersezione vicino
Q=1: punto d'intersezione distante
B
Smusso/Arrotondamento. Definisce il raccordo con il
successivo elemento del profilo. Programmare il punto finale
teorico, se si indica uno smusso/arrotondamento.
Nessun inserimento: raccordo tangenziale
B=0: raccordo non tangenziale
B>0: raggio arrotondamento
B<0: larghezza smusso
E
Fattore di avanzamento speciale per smusso/arrotondamento
(default: 1)
Avanzamento speciale = avanzamento attivo * E (0 < E <= 1)
Programmazione X, Z: assoluto, incrementale, modale o "?"
Attenzione Pericolo di collisione!
Se i parametri di indirizzo vengono calcolati con "variabili V",
ha luogo solo un controllo limitato. Assicurarsi che i valori
delle variabili diano un arco di cerchio.