1 generalità – HEIDENHAIN TNC 426B (280 472) Manuale d'uso
Pagina 45
29
HEIDENHAIN TNC 426 B, TNC 430
Sistema di riferimento
Un sistema di riferimento consente la definizione univoca di una
posizione in un piano o nello spazio. L ’indicazione di una posizione si
riferisce sempre a un determinato punto, definito dalle coordinate.
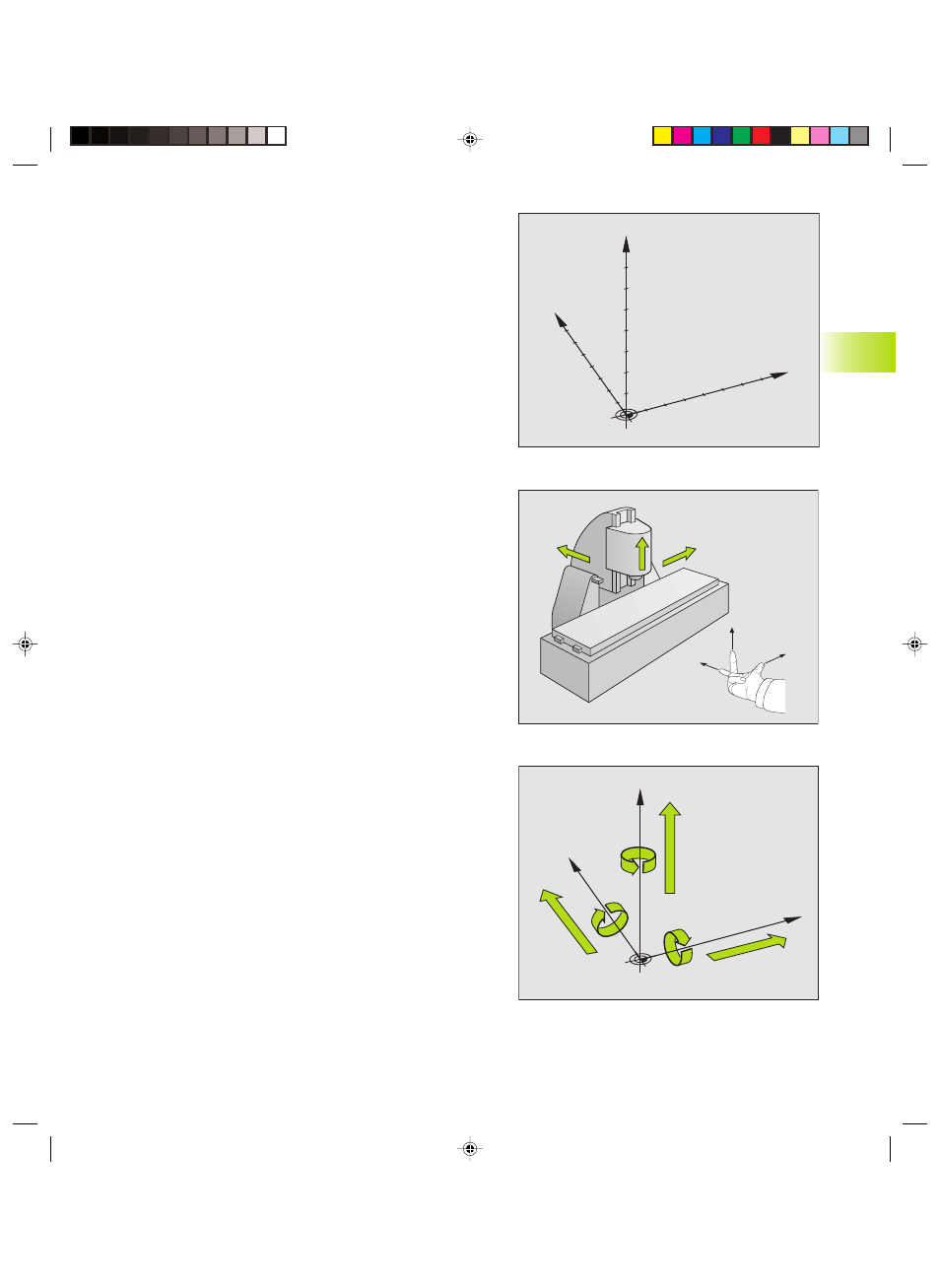
Nel sistema ortogonale (sistema cartesiano) vengono definite tre
direzioni con gli assi X, Y e Z. Questi assi sono rispettivamente
perpendicolari e si intersecano in un punto, il punto zero. Una
coordinata indica quindi la distanza dal punto zero in una di queste
direzioni. Una posizione nel piano può pertanto essere definita da due
coordinate e nello spazio da tre coordinate.
Le coordinate che si riferiscono al punto zero, vengono chiamate
coordinate assolute. Le coordinate relative si riferiscono ad una
qualsiasi altra posizione (punto di riferimento) nel sistema delle
coordinate. I valori di coordinata relativi vengono chiamati anche valori
di coordinata incrementali.
Sistemi di riferimento sulle fresatrici
Nella lavorazione di un pezzo su una fresatrice ci si riferisce
generalmente al sistema di coordinate ortogonali. La figura a destra
illustra l’assegnazione del sistema di coordinate ortogonali agli assi
della macchina. La ”regola delle tre dita della mano destra” serve da
supporto: quando il dito medio è diretto nel senso dell’asse utensile,
esso indica la direzione Z+, il pollice la direzione X+ e l’indice la
direzione Y+.
Il TNC 426 è in grado di controllare fino a 5 assi, il TNC 430 fino a 9
assi al massimo. Oltre agli assi principali X, Y e Z ci sono gli assi
supplementari U, V, e W, paralleli ai primi. Gli assi di rotazione
vengono chiamati A, B e C. La figura in basso illustra l’assegnazione
degli assi supplementari e degli assi di rotazione agli assi principali.
4.1 Generalità
W+
C+
B+
V+
A+
U+
Y
X
Z
Y
X
Z
+X
+Y
+Z
+X
+Z
+Y
Ekap4.pm6
30.06.2006, 07:22
29