Definizione di un vettore normale – HEIDENHAIN TNC 640 (34059x-04) Manuale d'uso
Pagina 460
Programmazione: lavorazione a più assi
12.6 Correzione utensile tridimensionale (opzione software 2)
12
460
TNC 640 | Manuale utente Dialogo con testo in chiaro HEIDENHAIN | 4/2014
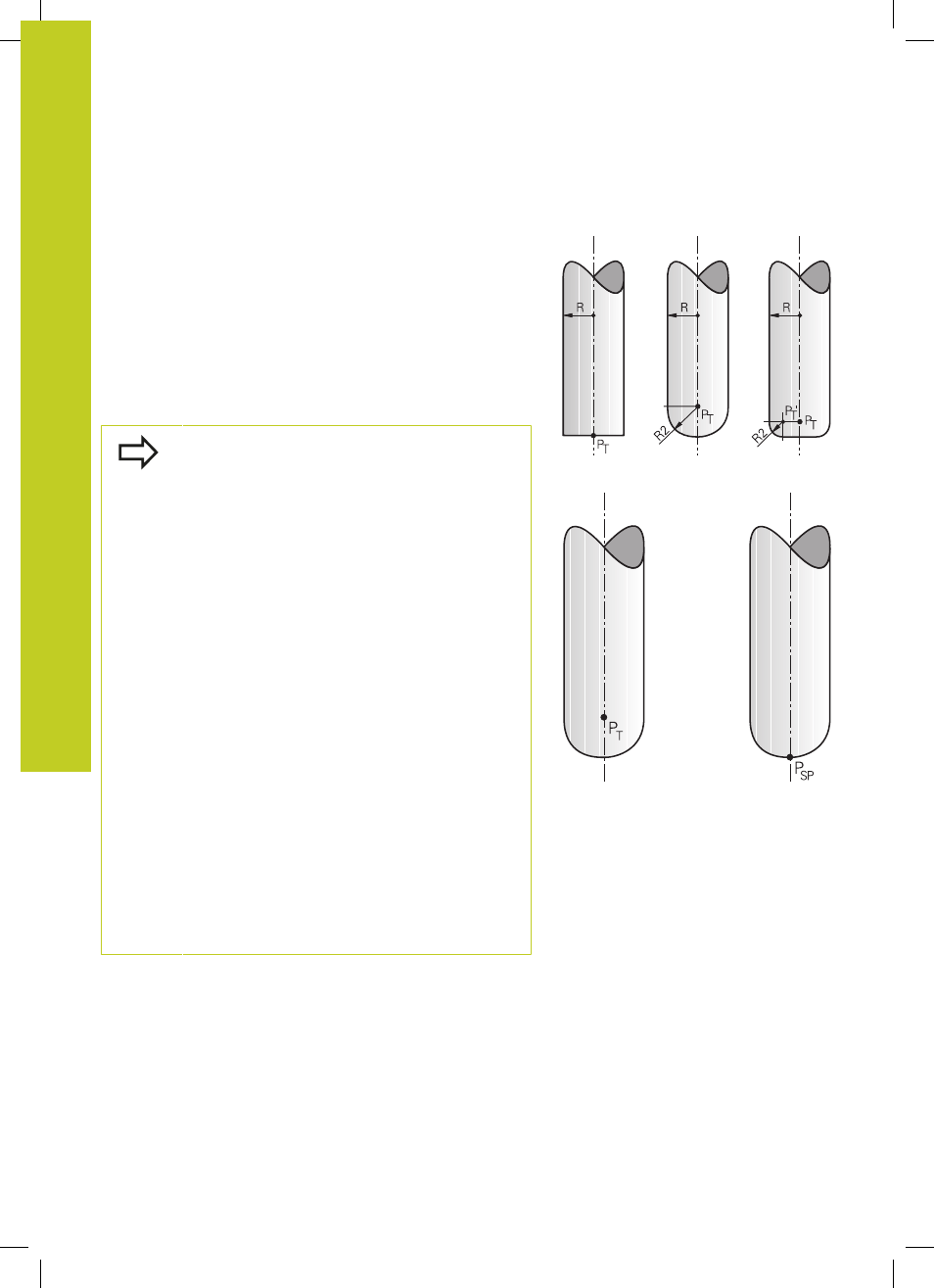
Definizione di un vettore normale
Un vettore normale è una grandezza matematica avente una
dimensione pari a 1 ed una qualsiasi direzione. Nel caso di
blocchi LN, il TNC necessiterebbe fino a due vettori normali, uno
per determinare la direzione dei vettori alla superficie, e l'altro
(opzionale) per la direzione dell'orientamento dell'utensile. La
direzione del vettore normale viene definita dalle componenti NX,
NY e NZ. Per le frese a candela e a raggio frontale esso è diretto
perpendicolarmente alla superficie del pezzo al punto di riferimento
utensile PT , per fresa a raggio laterale a PT’ ovvero PT (vedere
figura). La direzione dell'orientamento utensile è determinata dalle
componenti TX, TY e TZ.
Le coordinate per le posizioni X, Y e Z e per i vettori
normali NX, NY, NZ ovvero TX, TY e TZ devono
essere programmate nel blocco NC nello stesso
ordine di sequenza.
Nel blocco LN indicare sempre tutte le coordinate e
tutti i vettori normali, anche quando i valori non sono
variati rispetto al blocco precedente.
TX, TY e TZ devono essere definite sempre con valori
numerici. I parametri Q non sono ammessi.
Calcolare con massima precisione possibile i vettori
normali ed emetterli con il numero di cifre decimali
necessario per evitare interruzioni di avanzamento
durante la lavorazione.
La correzione 3D con vettori normali alla superficie
è valida per le indicazioni di coordinate negli assi
principali X, Y, Z.
Serrando un utensile con maggiorazione (valori delta
positivi), il TNC emette un messaggio d'errore. Il
messaggio d'errore può essere soppresso con la
funzione ausiliaria
M107 (vedere "Definizione di un
vettore normale", Pagina 460).
Il TNC non emette alcun messaggio d'errore in
caso di danneggiamento del profilo dovuto ad una
maggiorazione dell'utensile.
Mediante il parametro macchina
toolRefPoint si
determina se il sistema CAM ha corretto la lunghezza
utensile mediante il centro della sfera PT oppure il
polo della sfera PSP (vedere figura).